抓取器涉及并入機器人手臂中的特定零件,該機器人零件用于搬運物體并將其放置在指定位置。
可以使用不同類型的抓取器,例如類似于人手指的抓取器或包含在機器人手臂固定板上的橡膠吸盤。
夾爪的設計目的是承載不同的物體,并且在按計劃將包裝好的貨物放置在托盤上時,經常用在用吸盤進行紙箱或紙板的堆垛或搬運過程中。
-
碼垛和包裝貨物– EOLP(線尾碼垛)和取放應用;
-
-
-
輕便的工業級機器人用碳纖維抓手
抓取器的重量對于機器人的運行速度,負載下的手臂操作范圍,機器人手臂軸承的使用壽命以及手臂的負載能力至關緊張。規則很簡單:抓爪重量越重,性能就越差。因此,探求同時具有高剛度的超輕材料至關緊張。
夾爪/吸盤通常由鋁制成。鋁的重量是鋼的3倍,可以輕松進行CNC加工-適用于軟金屬。
但是,如今可以買到的材料比鋁(例如碳纖維)具有更輕的重量和更高的剛度。
碳纖維比鋁輕約42%,并具有很高的剛度。碳纖維組件的剛度取決于所用材料的類型。
用預浸料技術和0/90機織標準織物制成的碳纖維復合材料的剛度為90.5 GPa。剛度(楊氏模量),而鋁的剛度為69 GPa。
標準碳纖維復合材料的剛度比鋁高30%, 而重量輕42%。
高模量航空航天單向(UD)碳纖維零件的強度甚至是鋁的3-4倍。這種織物的價格是標準碳纖維的幾倍,但是卻為減輕重量和進步剛度提供了很多可能性。
碳纖維如何用于抓手和工業機器人?
與鋁相比,碳纖維抓手/機器零件提供的上風:
-
-
-
-
-
-
引人入勝的表面在競爭中脫穎而出,并被認為是最先輩的工程解決方案-塑造營銷
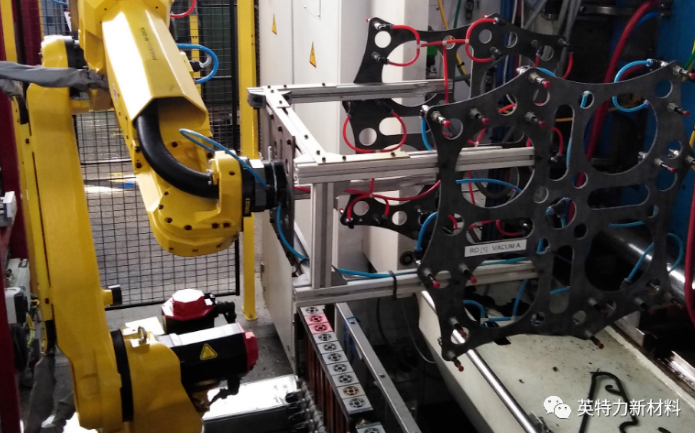
碳纖維通常用于第二領域,涉及工業用途的機械臂,旨在確保超輕的結構和出色的強度。
經過修改后,抓手的重量在10kg以下。組裝并重新投入運行后,性能顯明改善,但5軸活動不規則,從而無法正確收集和處理零件。
但是,考慮到夾持器沒有效于同時從模具層收集零件的致動器,夾持器的重量仍然過大。操作過程中出現不規則和耽誤的性能是不可避免的。
因此,每張碳纖維板重約0.7千克。進一步的改動使夾具的重量削減到7.5kg以下。但是,使用碳纖維部件可使抓爪的重心偏移188毫米,這使機器人的負載能力從8kg增長到了約10.5kg。
-
-
-
配備機械手的機器人比原來的機械手輕(14公斤),操作速度更高,這意味著它無需使用實行器即可達到目標目標(機器周期時間);
-
|







 山東英特力新材料有限公司 版權所有
地址:山東省濟寧市高新區崇文大道431號英特力工業園
電話:0537-5159886 傳真:0537-5159886
網站備案號:
山東英特力新材料有限公司 版權所有
地址:山東省濟寧市高新區崇文大道431號英特力工業園
電話:0537-5159886 傳真:0537-5159886
網站備案號: